Hi @David_Vannerom,
sorry for the late reply, I understand that this is a follow up on Upper limits as a function of signal parameter 
First of all the general idea: systematic uncertainties are implemented as additional nuisance parameters that are constrained by some auxiliary information. So in your case, the nuisance parameter is nbkg, and your constraint is a Gaussian distribution around some expected value with 10 % uncertainty, if I understand correctly.
Where you get it wrong is that you define this auxiliary Gaussian over the mass, and not nbkg. You should define an additional Gaussian for nbkg for your systematic constraint, and then multiply this on top of your existing model with RooProdPdf as explained in this tutorial.
In your script, this would look like
# Add nuisance parameter for background systematic constraint
bkg_constr = ROOT.RooGaussian("bkg_constr", "bkg_constr", nbkg,
ROOT.RooFit.RooConst(bg), ROOT.RooFit.RooConst(0.1*bg))
# The model for the counting experiment.
model_noconstr = ROOT.RooAddPdf("model_noconstr", "model_noconstr",
ROOT.RooArgList(sig, bkg), ROOT.RooArgList(nsig, nbkg))
# The final model for the counting experiment with systematic constraints.
model = ROOT.RooProdPdf("model", "model",
ROOT.RooArgList(model_noconstr, bkg_constr))
That’s how you implement your background bg expectation with 10 % uncertainty.
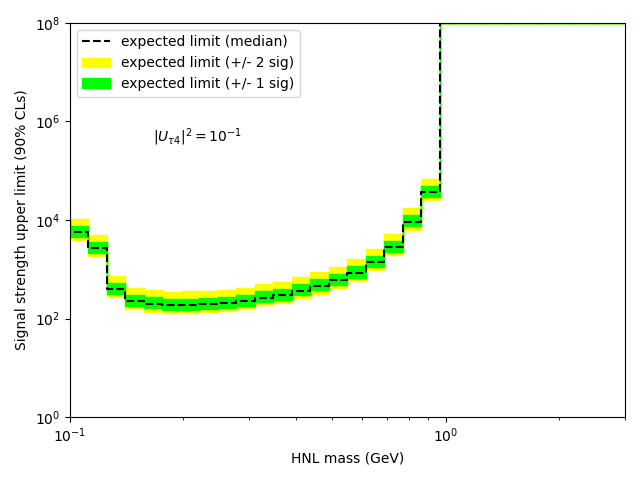
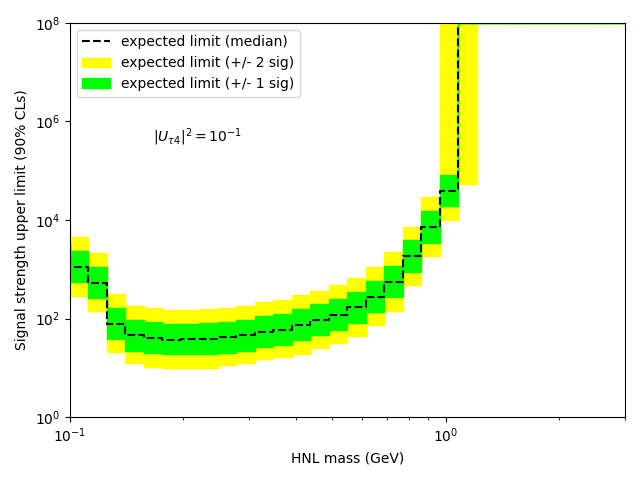
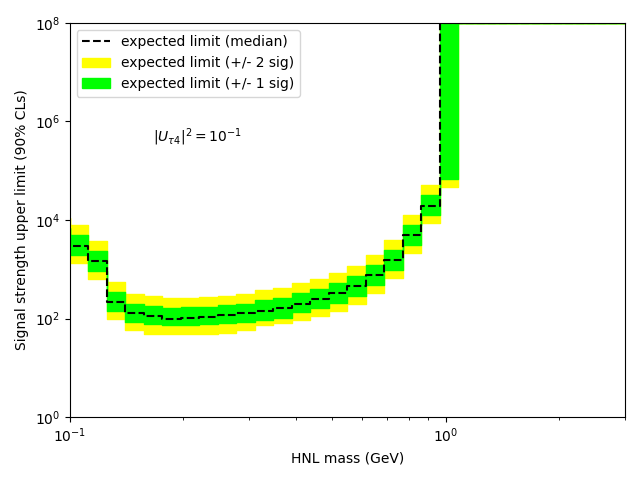
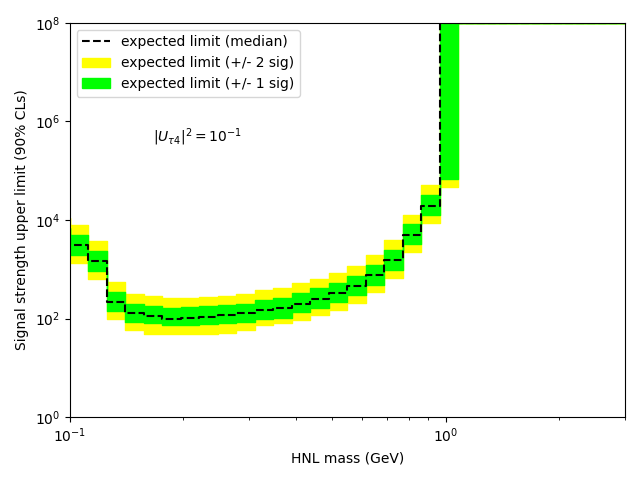
If you do that, you will indeed see that your limit improves (which was already the case in your original post, but only by chance I think). Why is that? In your fit that you based on my toy example from the previous thread, there was actually no background constraint included. I’m sorry that the example was so minimalist. Instead, the example just had a nbkg parameter that was completely floating and not constrained by any prediction. This is of course not a meaningful measurement, and the only power that this “analysis” had was to tell you that the signal can’t be more than the observed number of events, without subtracting the background. That’s also why your initial Brazilian plot in the other thread had this funny shape: if the nsig parameter was smaller than the expected observed number of events, your p-value was just flat 0.5, before dropping of.
So when you consider your Gaussian nkbg prediction with the 10 % uncertainty, you will improve your upper limit and have a meaningful analysis.
By the way, you can also check out how your analysis would perform if your background prediction is perfect and you have no systematic uncertainty: just fix your background parameter with nbkg.setConstant(True) and don’t pass any nuisance parameters to the model config with conf.SetNuisanceParameters(ROOT.RooArgSet()). That’s also a good sanity check. If your constraints are correctly implemented, your limits will be somewhere between the fixed-background case and the completely unconstrained case you started with.
I hope this makes sense to you, as always feel free to ask follow-up questions. I’ll try to answer them in time now!
Cheers,
Jonas